In the last post in this sequence, I talked about the first electronic speed controllers that were used in series golf carts. The first series controllers to come out were totally electronic, but they were not “computerized”. Therefore, nothing was adjustable in terms of the cart’s operation. As time went by, these controllers became more and more sophisticated and actually did contain at least one microprocessor which could be programmed to accommodate changes to their performance. The basic programming of the controller was done at the factory, but the programs often included “options” that could be set in the “field”, by either the owner of the cart or a technician (with the right equipment). Setting these options is commonly referred to as programming the controller (although it really isn’t), so we will use that terminology in the rest of these posts.
Let’s take, for example, the way that the cart would respond to the position of the throttle. Obviously, we want the cart to go from 0% of its maximum capable speed to 100% of it as the accelerator pedal goes from its “at rest” position to its “pedal to the metal” position. But just how the controller reacts to the accelerators movement is referred to as its “throttle response curve”. If we wanted an absolutely direct correlation, we would call that a linear throttle response. But let’s say you wanted to “ease” into taking off so you wanted the cart to react “gently” to the initial movement of the accelerator and then speed up more quickly with further motion. That would not be linear at all. If plotted on a graph of “accelerator motion versus speed of the cart”, it would have a different shape.
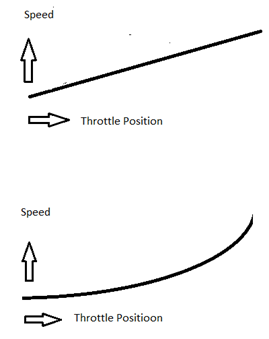
In the following drawing, the top chart shows a linear relationship (curve) between the position of the accelerator and the speed of the vehicle. In the bottom chart, the curve is altered to indicate that as the accelerator is first moved, the reaction of the cart in terms of speed, is quite “mild” compared to later in its travel. This might be referred to as a “logarithmic” curve, or by some other name (I’ve seen several) but the point is that it is no longer linear.
In order to “tell” the controller what curve you want, you have to “hook” the controller to some device that “speaks its language”. In the earlier days of the development of these kinds of controllers, one of the most common ways to do that was through a computer’s serial port (notebook or PC). As time went on, the method of communication shifted to using the USB port. Of course, you had to load a copy of the controller manufacturer’s special software on your computer, but that could usually be done quite easily by “downloading” from the manufacturer’s web over the internet. Some of the controllers had to be programmed with a special tool that only an authorized dealer could buy. So, you had to take the cart to an authorized dealer and let him set the options (for a fee, of course). This really opened up a whole new world in controller production. Some of the features that could be “programmed” on many of these controllers are as follows:
Throttle Response Curve (as mentioned above)
The controller can be programmed to accept throttle position information from different types of devices (potentiometer, inductive type, etc.)
The maximum speed that the cart can access can be limited (safety issue when kids are involved)
The maximum Current draw from battery pack can be limited
Making the cart run at only half-speed when in reverse can be selected or de-selected
The controller can be programmed to NOT run if the accelerator were to get stuck in a high-speed position when the cart was first told to move
Protection settings could be programmed to limit the controller to only operating if the battery pack voltage is safe for it to do so (so as to protect the controller from damage)
There are self-diagnostic features built into the software of most of these controllers that help identify problems with the system by flashing LEDs or using the back-up buzzer to signal what issues needed to be taken care of
Another reminder: we are still talking about the electronic controllers in SERIES type golf carts. Series meaning that the armature coils and the field coils in the motor are wired in series by the cart’s wiring system. Another type of system is called a “shunt” or “sepex” type. In a shunt system, the armature and the field each are controlled by separate outputs of the shunt controller. This gives the ability to manage current flow through the field independent of current flow through the armature. This makes for much better control of the system as we will discuss in future posts in this sequence. See you later, Ron.